MagicDog
- Product Details
- Product Specifications
- Related Downloads
- FAQ
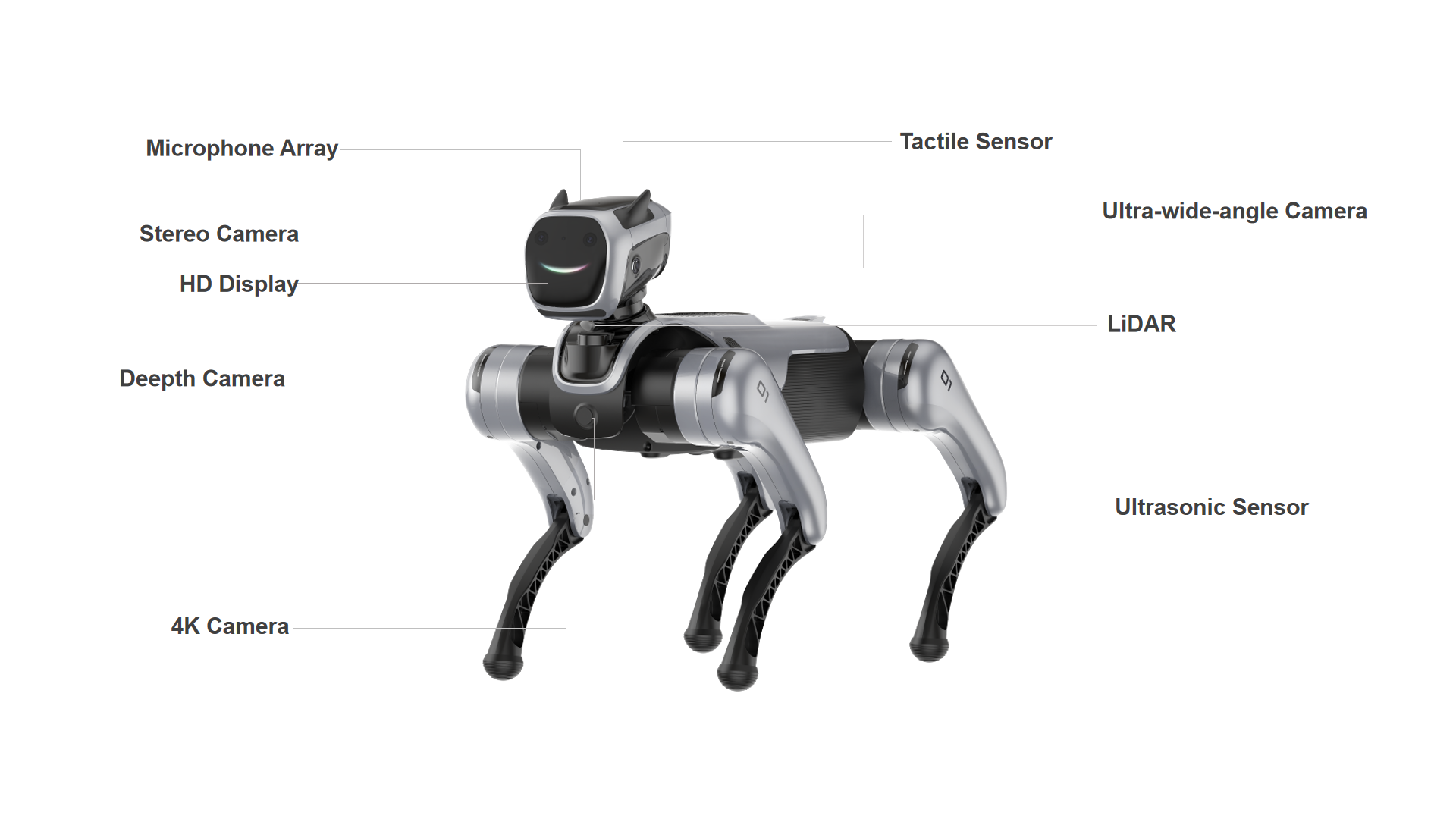
MagicDog
· 13 Degrees of Freedom enabling lifelike, agile motion
· In-house Developed Joint Modules for precision and reliability
· Intelligent Emotion Engine enabling multi-modal interaction through voice, vision, and touch

Autonomous Emotion Expression
The first quadruped robot dog that can autonomously express emotions. It has a built-in quadruped robot dog emotional interaction system, giving the quadruped robot dog "life" and supporting all-round perception and interaction through language, vision, and touch, responding to your emotions anytime, anywhere.

Independent thinking and autonomous behavior
The intelligent AI SAGE algorithm endows the quadruped robot dog with the ability to think independently and act autonomously. It can perceive complex environments in real time and make autonomous decisions.

Precise targeting and intelligent following
Utilizing the TOP-DOWN method, target detection, recognition, and continuous tracking are achieved; combined with a depth camera to acquire the target's 3D coordinates, the following speed is dynamically adjusted for a smooth, interactive experience throughout.

All-terrain capability with superior obstacle crossing performance
Utilizing a single-line LiDAR, binocular camera, and RealSense technology in tandem, it accurately identifies obstacles in complex terrain; It possesses active obstacle crossing capabilities, flexibly adapting to uneven terrain such as slopes and gravel roads; Maximum climbing drop height is 15cm, and maximum climbing angle is 40°.

High-Degree-of-Freedom Body Design & A Variety of Hard-Core Stunts
With 13 joint degrees of freedom and equipped with low-noise and high-torque motor joints; it can realize more than 30 difficult posture displays such as backflip, moonwalk, handshake, and stretching.

Equipped with 4K HD Camera & One-Click Photo Shooting
The MagicDog head-mounted camera allows for both photo and video modes to capture every precious moment.
| Device Name | Parameter | Description | ||||
| Quadruped Robot MagicDog | Basic Information | Model | EDU | |||
| Material | Aluminum alloy + high-strength engineering plastic | |||||
| Product Size (L×W×H) | Standing | 67cm x 35cm x 56cm | ||||
| Lying | 72cm * 44cm * 29cm | |||||
| Net Weight(without battery) | 15.8kg | |||||
| Electrical Parameters | Maximum Power | 3200W | ||||
| Supply Voltage | 22V-36V | |||||
| Processing Chip | 8-core processor | |||||
| 4G | SIM card insertable | |||||
| Wi-Fi | WIFI 5.0 | |||||
| Bluetooth | BT 5.0/4.2/2.1 | |||||
| Storage Space | 64G | |||||
| Output Power | DC 28.8V (battery voltage) | |||||
| Connection | RJ45 Ethernet port | |||||
| Performance Parameters | Degrees of Freedom | 13 | ||||
| Basic Computing Power | 8-core high-performance CPU | |||||
| Maximum Speed | 3.0m/s | |||||
| Maximum Climbing Drop Height | 10kg | |||||
| Drop Detection Height | 16cm | |||||
| Maximum Climbing Angle | 40° | |||||
| Battery Life | 1.5-3.0h | |||||
| Whole Machine Joint Parameters | Actuator Type | High power density motion unit | ||||
| Maximum Joint Torque | Approximately 37.5N·m | |||||
| Aluminum Alloy Precision Joint Motor | 12 pcs | |||||
| Joint Motion Space (Body) | -37.0° - 45.0° | |||||
| Joint Motion Space (Thigh) | -207.5° - 72.5° | |||||
| Joint Motion Space (Calf) | -143.0°- 30.0° | |||||
| Joint Actuator Composition | Motor, reducer, driver, encoder | |||||
| Sensors | MIC Array | Equipped | ||||
| LiDAR | Model | STL-19P | ||||
| Ranging Range | 0.03-12 meters (80% reflectivity white target test) | |||||
| Ranging Accuracy | ±30mm @ 2-12m (white target), Standard deviation 15mm | |||||
| Scanning Frequency | Min 6 Hz, Typical 10 Hz, Max 13 Hz | |||||
| Ranging Frequency | 5000 Hz (fixed frequency) | |||||
| Pitch Error | Min 0.5°, Max 2° | |||||
| Yaw Error | Min -1°, Typical 0°, Max 1° | |||||
| Angle Resolution | Typical 0.72° @ 10 Hz | |||||
| Anti-Ambient Light Capacity | Max 60 KLux | |||||
| LiDAR Noise | Typical 45 db | |||||
| Whole Machine Life | 10000 hours | |||||
| Operating Temperature | -10°C to 45°C | |||||
| Storage Temperature | -30°C to 70°C | |||||
| Protection Grade | IP5X | |||||
| 4K Camera | Image Senso | 1/3.06inch CMOS Sensor | ||||
| Maximum resolution | 3840H×2880V | |||||
| Pixel size | 1.12um*1.12um | |||||
| Exposure system | Auto Exposure | |||||
| Electronic shutter | Global shutter | |||||
| Interface speed | 480MB/S (USB2.0) | |||||
| Operating temperature | 0℃ ~ 60℃ | |||||
| Operating temperature | 0℃ ~ 65℃ | |||||
| Focal length | 2.22MM | |||||
| Field of view | D:117° H:94.8° V:76.7° | |||||
| Distortion | <10.3% | |||||
| Spectral characteristics | No IR (No filter) | |||||
| Aperture | 2.2±5% | |||||
| Binocular Camera | Image Sensor | 1/4inch CMOS Sensor | ||||
| Maximum Resolution | 2560H×720V | |||||
| Pixel Size | 3.0um*3.0um | |||||
| Signal-to-Noise Ratio | 38dB | |||||
| Dynamic Range | 63.9dB | |||||
| Exposure System | Auto Exposure | |||||
| Electronic Shutter | Global shutter | |||||
| Interface Speed | 480MB/S (USB2.0) | |||||
| Operating Temperature | 0℃ ~ 50℃ | |||||
| Storage Temperature | 0℃ ~ 60℃ | |||||
| Connection Interface | 5-pin 1.25mm USB2.0 | |||||
| Image Display Orientation | Orthogonal | |||||
| Focal Length | 3.15MM | |||||
| Field of View | D:162° H:135° V:73° | |||||
| Distortion | <14.3% | |||||
| Spectral Characteristics | 650nm | |||||
| ( Optical filter) | ||||||
| Aperture | 2.35 | |||||
| Ultra-wide-angle Camera | module model | ZV-A0588-V5.1 | ||||
| Module dimensions | 32.00mm × 32.00mm × 15mm | |||||
| Operating temperature | -30°C to 80°C | |||||
| Storage temperature | -10°C to 60°C | |||||
| Camera board assembly technology | SMT (ROHS) | |||||
| Focal distance | 30CM~infinity | |||||
| Power supply voltage | USB_5V | |||||
| Connection interface | USB 2.0 -5P 1.25mm | |||||
| Pitch: SMD (Standing mount) | ||||||
| Power | MAX 1W,Current | |||||
| 140mA~160mA | ||||||
| Operating system | Win XP、Win 7、 | |||||
| Linux 2.6.20 and above | ||||||
| Packaging | Anti-static tray | |||||
| Sensor type | (1/2.7”) | |||||
| Maximum effective pixels | 2 megapixels (WDR) | |||||
| Maximum dynamic range | 85db | |||||
| Pixel size | 3.0μm x 3.0μm | |||||
| Lens type | 1/2.7 inch | |||||
| Lens Construction | 6G+IR | |||||
| Aperture | 2 | |||||
| Effective Focal Length | 2.0mm | |||||
| Field of View | D:200° H:200° V:200° | |||||
| Distortion | 110% | |||||
| Filter Size | 650±10nm | |||||
| Gain/Exposure/White Balance | Auto | |||||
| Depth Camera | Dimensions | 124mm*29mm*26mm | ||||
| Minimum Depth Distance | 0.105 meters | |||||
| Depth Image Resolution | 1280*720 @ 30fps; | |||||
| 848*480 @ 90 fps | ||||||
| Depth Field of View | 86° * 57° (±3°) | |||||
| Ultrasonic Sensor | Equipped | |||||
| Touch Sensors | Equipped | |||||
| Accessories | Installation dock | Optional | ||||
| Battery | 29.6V 8200mAh | |||||
| 242.72W Quick-release | ||||||
| Adapter | 33.6V 4.5A 149W | |||||
| Battery charging dock | Equipped | |||||
| Replaceable feet | Equipped | |||||
| Handle | Equipped | |||||
| Function | Secondary Development[2] | Programming language | C++ | |||
| Python | ||||||
| API | Robot main control service | |||||
| High-level motion control service | ||||||
| Low-level motion control service | ||||||
| Sensor control service | ||||||
| Voice control service | ||||||
| Status monitoring service | ||||||
| SLAM navigation control service | ||||||
| OTA upgrade | Supported | |||||