

MagicBot Gen1
- Product Details
- Product Specifications
- Related Downloads
- FAQ
MagicBot Gen1
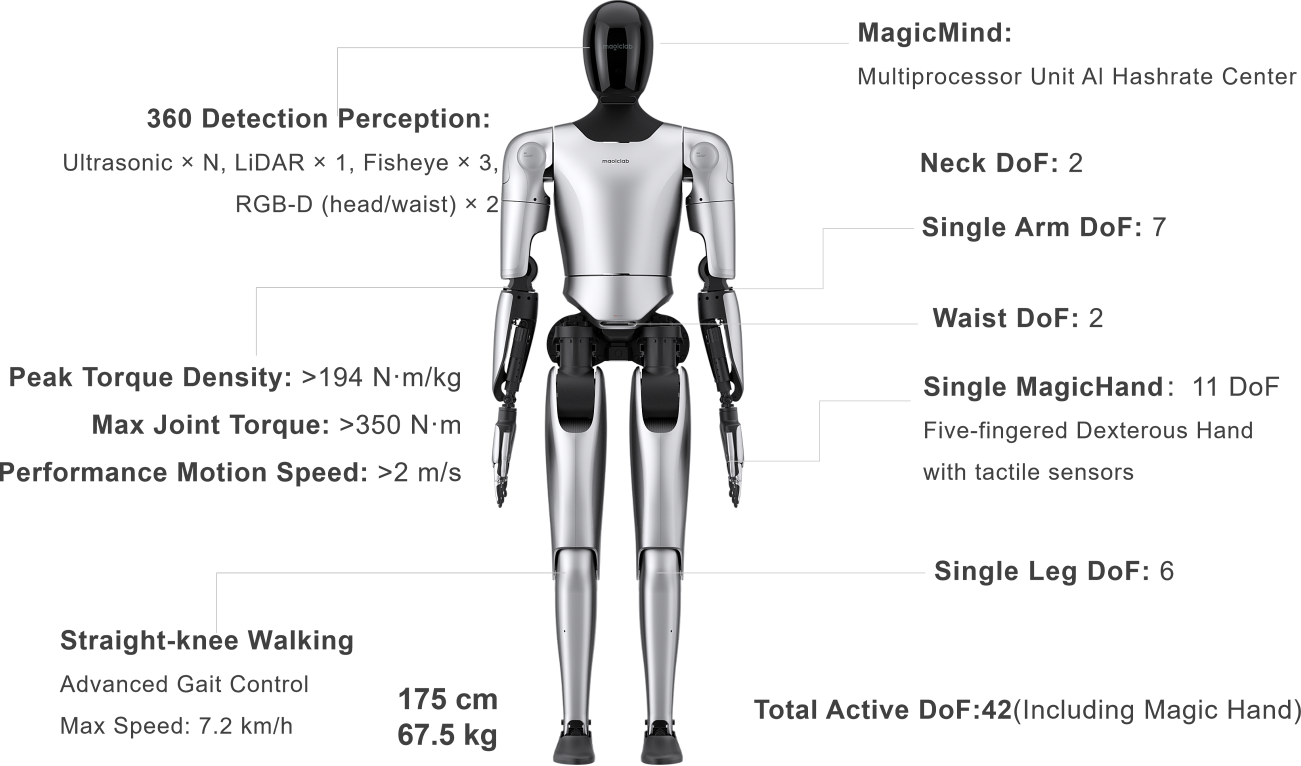
·42 Active Degrees of Freedom across the entire body
·Equipped with in-house developed Magic-Hand (advanced dexterous hands) and joint modules
·Powered by proprietary industry-specialized AI model, “MagicMind”, enabling deployment across industrial, commercial, and home environments → Allows humanoid robots to be rapidly deployed for task execution in specific real-world scenarios

Multi-Robot Collaboration for Efficient Production
China’s first general-purpose humanoid robot with multi-robot collaboration capability, supporting multiple robots to work together to complete complex tasks.

Excellent Overall Performance for Operational Stability
Featuring 42 degrees of freedom, the joints have extremely high flexibility to meet the needs of precision operations; the high-performance drive system has strong load capacity and can run continuously for a long time, meeting the requirements for stability and efficiency.

Full-Scenario Environmental Perception for Complex Challenges
Through a multi-sensor fusion scheme, the robot has perception capabilities in various indoor and outdoor scenarios, enabling accurate response to multi-layered space and complex terrain environments; relying on independently developed algorithms, the robot can achieve stable autonomous navigation in complex terrains.

Self-Optimized Walking Posture with Natural Gait and Strong Dynamic Adaptability
Relying on advanced motion control algorithms and self-learning capabilities, the robot can continuously optimize its gait to make the walking posture more natural. At the same time, it maintains balance during movement and will not fall due to terrain changes or external interference, adapting to the walking needs of different scenarios.

Precision Operation Capability for Accurate Action Execution
The robot accurately perceives objects through the vision system, allowing operational actions to align with targets in real time to ensure high-precision operations; the full-body imitation learning floating base design imitates human operation logic to complete complex and precise tasks requiring full-body collaboration.

Multi-Scenario Intelligent Guided Tour with Professional Explanation
Through the humanoid robot’s autonomous walking, environmental perception and natural interaction capabilities, it provides stable and professional guided tour and explanation services for various venues such as corporate exhibition halls, museums, and science and technology museums, creating an immersive interactive experience and reducing labor costs.

| Device Name and Version | Parameter | Description | |||
| Full-Sized Bipedal Humanoid Robot MagicBot Gen1 | Mechanical Parameters | Standing Size | 1740*580*280 mm | ||
| Arm Span Length | 800 mm (Shoulder Joint to Fingertip) | ||||
| Thigh + Calf Length | 960mm(10 mm + 450 mm) | ||||
| Overall Weight | Approx. 70 kg | ||||
| Material | Main Structure: Aluminum Alloy, | ||||
| Exterior Plastic Parts: PC+ABS | |||||
| Reducer | Harmonic Reducer/Planetary Reducer | ||||
| Maximum Joint Torque | ≥ 350 N·m | ||||
| Movement Speed | ≥ 4 km/h | ||||
| Total Degrees of Freedom | 42 (Active Degrees of Freedom) | ||||
| Neck Degrees of Freedom | 2(Yaw Axis*1 + Pitch Axis*1) | ||||
| Arm Degrees of Freedom | 7(Shoulder Joint*3 + Elbow Joint*1 +Wrist Joint*3) | ||||
| Single Hand Degrees of Freedom | 11 (6 Active Degrees of Freedom, 5 Passive Degrees of Freedom) | ||||
| Waist Degrees of Freedom | 2(Yaw Axis*1+ Roll Axis*1) | ||||
| Leg Degrees of Freedom | 6(Hip Joint*3 + Knee Joint*1 +Ankle Joint*2) | ||||
| Electrical Parameters | Development Computing Unit | Model | Jetson Orin NX | ||
| CPU | Arm® Cortex®-A78AE | ||||
| Number of Cores | 8 | ||||
| Number of Threads | 8 | ||||
| Maximum Boost Frequency | 2GHz | ||||
| Video Memory | 16G | ||||
| Video Memory | 16G | ||||
| Cache | 2MB L2 + 4MB L3 | ||||
| Storage | 512G | ||||
| GPU | 1024-Core NVIDIA Ampere Architecture GPU with 32 Tensor Cores | ||||
| Maximum Dynamic Frequency of Graphics Card | 918MHz | ||||
| Gaussian and Neural Accelerator | 3 | ||||
| Instruction Set | 64bit | ||||
| OpenGL | 4.6 | ||||
| OpenGL ES | 3.2 | ||||
| Vulkan™ | 1.1 | ||||
| CUDA | 11.4 | ||||
| Perception Sensors | MID-360 3D LiDAR | ||||
| D435 Depth Camera*2 | |||||
| Fisheye Camera*3 | |||||
| Audio Module | Circular Microphone | ||||
| Speaker | |||||
| WiFi | WiFi 6 | ||||
| 4G/5G Module | 5G | ||||
| Bluetooth | BT 5.2 | ||||
| Supporting Accessories | Battery Capacity | 25Ah(1.35kWh) | |||
| Battery Life | 3-5 Hours | ||||
| Charging Time | 3 Hours | ||||
| Others | Voice Interaction | Voice Commands | |||
| Chatbot | |||||
| Intelligent Voice Guide | |||||
| Movable Terrain | All Terrains | ||||
| Visual Interaction | Face Recognition | ||||
| Autonomous Navigation | Equipped | ||||
| Autonomous Obstacle Avoidance | Equipped | ||||
| Map Construction | Manual Mapping | ||||
| Map Management | Equipped | ||||
| OTA Upgrade | Supported | ||||
| Secondary Development | Programming Language | C++ | |||
| Python | |||||
| API | Robot Main Control Service | ||||
| High-Level Motion Control Service | |||||
| Low-Level Motion Control Service | |||||
| Sensor Control Service | |||||
| Voice Control Service | |||||
| Status Monitoring Service | |||||
| SLAM Navigation Control Service | |||||
| Control Devices | Mobile Phone(Android & iOS) | ||||
| Pad (Android & iOS) | |||||
| Controller | |||||
{kind=link}
Chinese first humanoid robot with multi-robot collaboration
Powered by proprietary industry-specialized AI model, "MagicMind", enabling deploymentacross industrial, commercial, and home environments - Allows humanoid robots to berapidly deployed for task execution in specific real-world scenarios Powered by proprietary industry-specialized AI model, "MagicMind", enabling deploymentacross industrial, commercial, and home environments - Allows humanoid robots to berapidly deployed for task execution in specific real-world scenarios